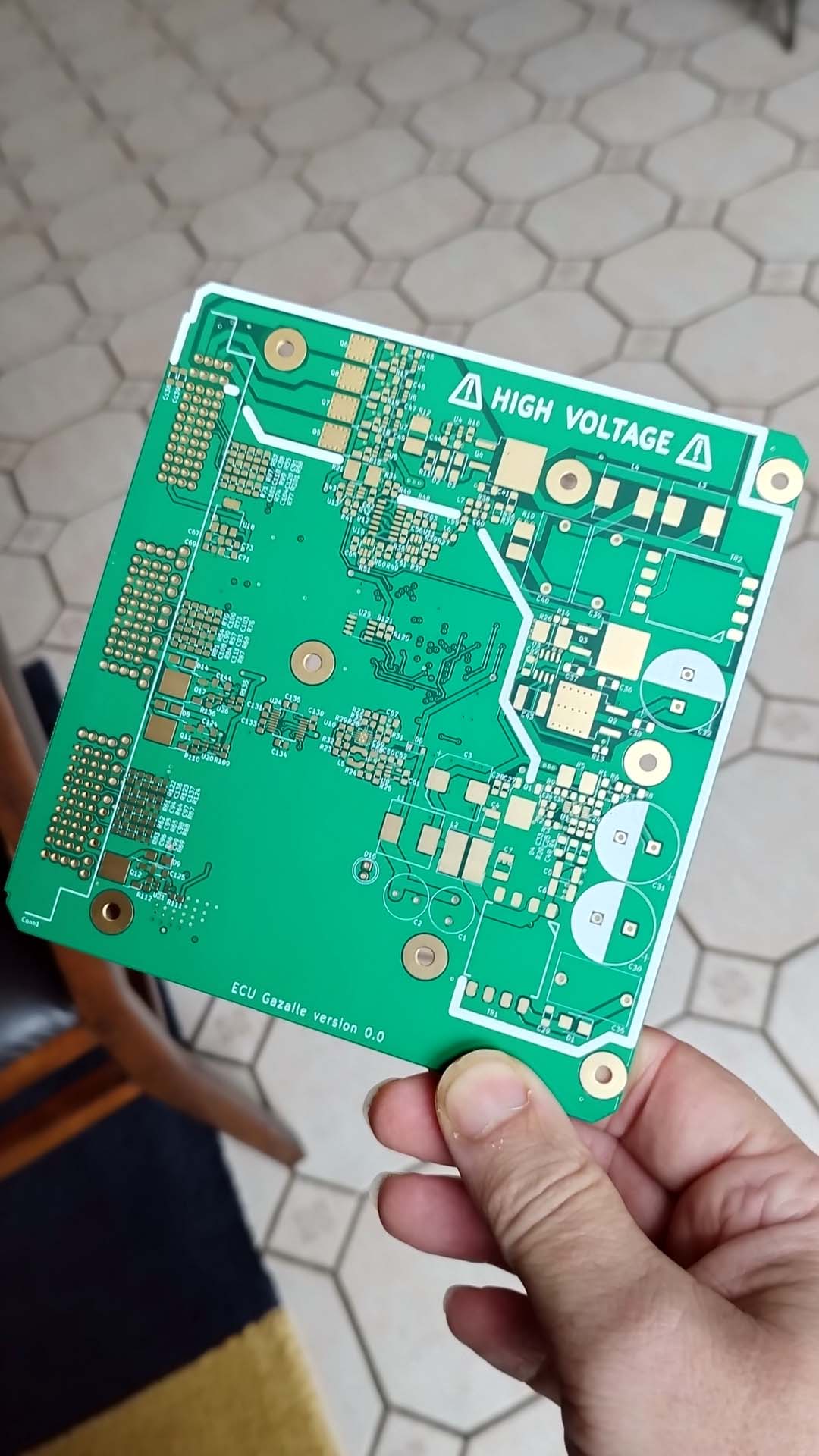
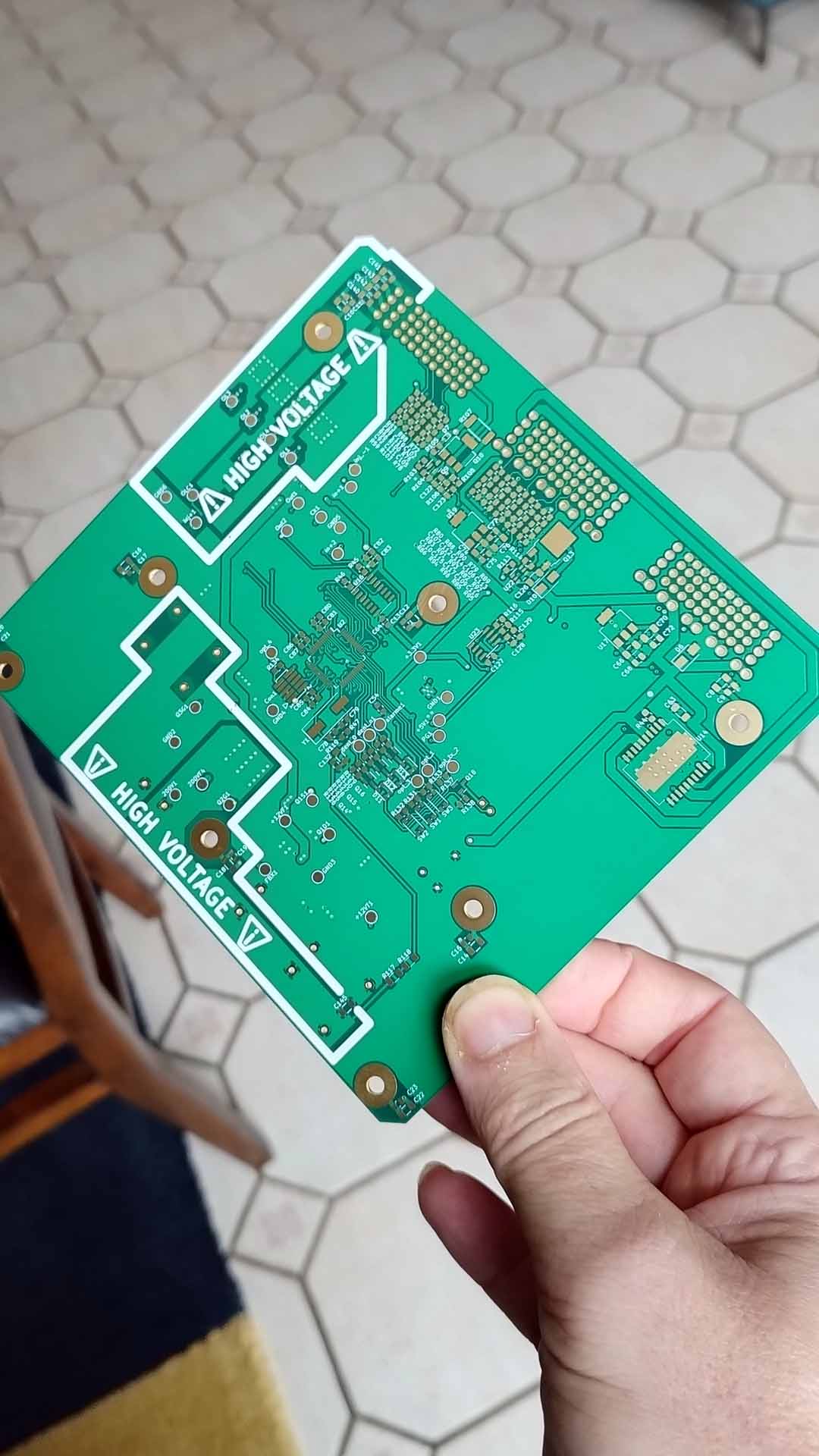
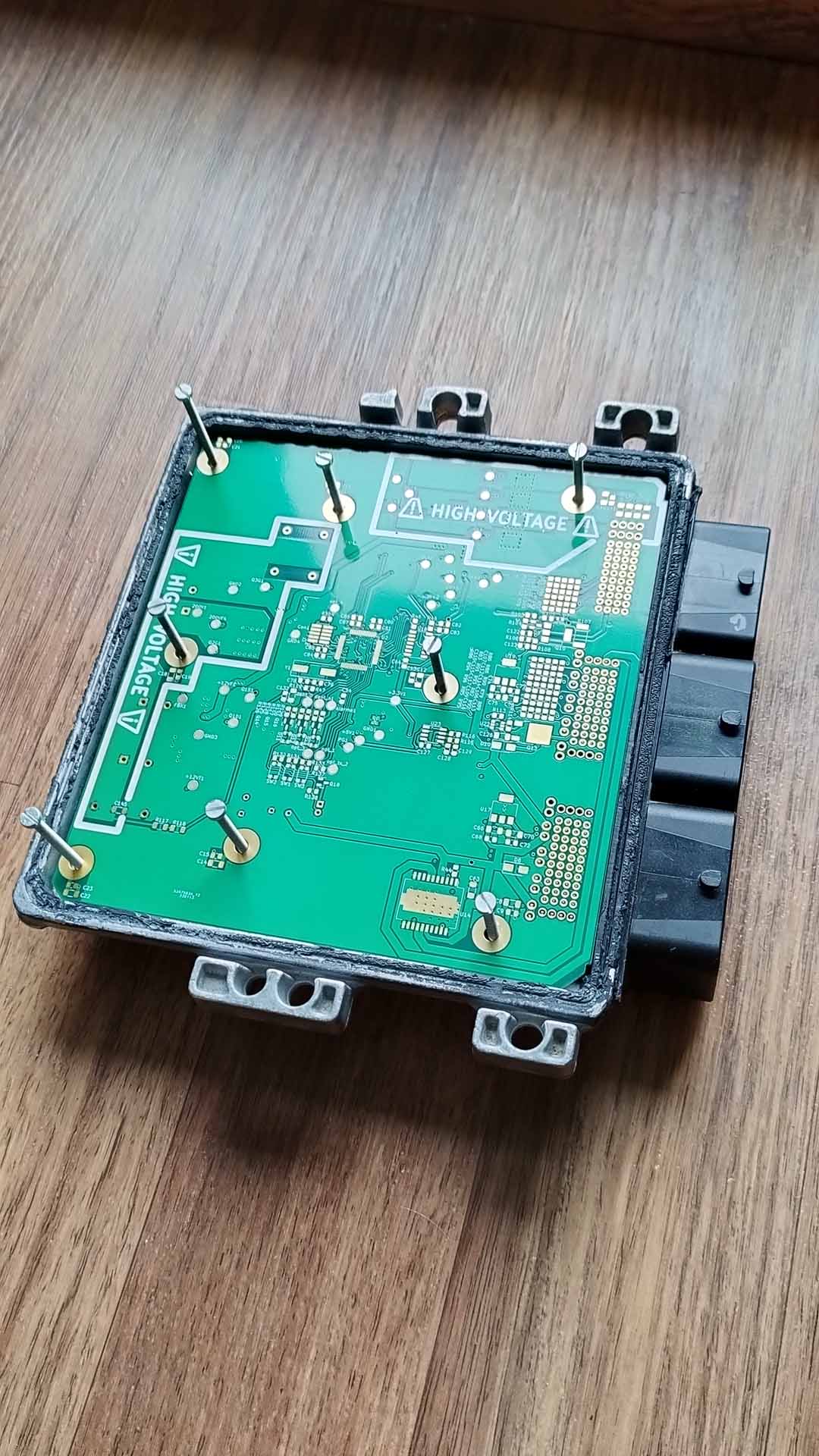
Je commence le câblage de l’ECU avec le convertisseur DC/DC 12V/200V. Le plus difficile est de braser correctement le boîtier MSOP (3 broches sur 1 mm) du pilote de chez Linear Technology LT3757. Pour les composants passifs j’ai privilégié au minimum des boîtiers CMS au format 0805 et plus généralement des boîtiers avec un format pour que ça reste humainement manipulable.
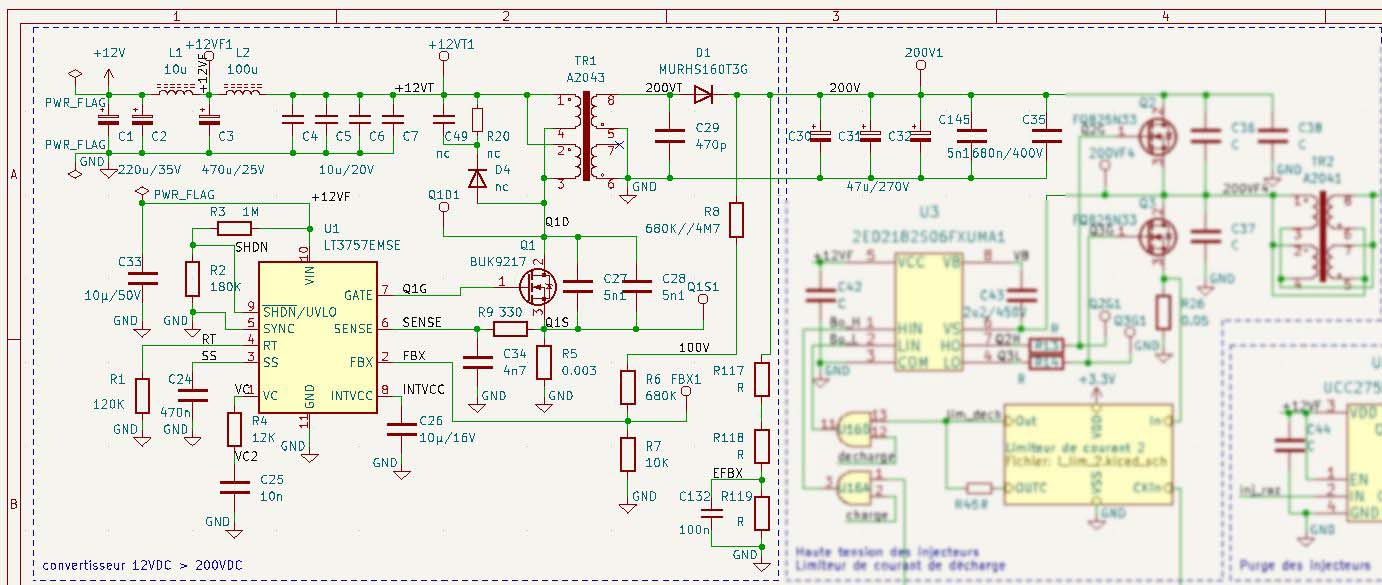
La topologie est dite « High Voltage Flyback Power Supply ». Le principe est que le primaire de TR1 transforme l’énergie électrique en énergie magnétique lorsque Q1 conduit (considérons Q1 comme un interrupteur). Puis à l’ouverture de Q1, vu l’agencement des polarités des enroulements, cette énergie magnétique est transformée en énergie électrique avec un rapport tension courant différent et déverser dans les condensateurs C30 à C38 à travers D1. L’opération est répétée cycliquement.
R3 et R2 sont ajustés pour mettre en marche le convertisseur à partir de 10V et l’éteindre en dessous de 8V. Cette hystérésis important de 2 V permet d’éviter que le circuit oscille entre marche et arrêt du fait qu’il induit une charge qui fait apparaitre une tension aux bornes du câblage.
La fonction « démarrage doux » ajustée avec C24 permet aussi d’étaler cette charge temporellement, à la mise sous tension environ 12ms avant le démarrage de l'oscillateur de U1.
Pour les oscillogramme ci-dessus : trace jaune CH1 Q1G, trace bleue CH2 Q1S, trace violette CH3 200V, trace verte CH4 +12V qui sert de déclencheur de traces. Dans le premier, 11.9ms aprés la mise sous tension +12V on voit le début du fonctionnement du pilote. Dans le second on voit la limiation de courant qui espace les pulses de Q1G. Dans le troisième on voit sur la trace violette la montée progressive du 200V sans charge, le quatrième avec une charge de 45W.
Du fait des caractéristiques de TR1 (inductance primaire 2µH, courant de saturation supérieur à 40A, rapport N=7) le choix de la fréquence d’oscillation est de 130kHz réglée par R1.
Le point de consigne pour ajuster la tension de sortie est ajusté par R8, R7 et R6.
J’utilise le régulateur intégré INTVCC pour fournir la tension de pilotage de la gate de Q1 autour de 7.2V.

Dans un premier temps je règle R8, R7 et R6 pour une tension de sortie de 50V, ce qui me permet de ne pas trop faire attention où je mets mes doigts pour affiner les réglages. Ma première observation est un rendement global pas terrible 70% (entre le +12V de l’alimentation et le 200V), pour optimiser j’ai du :
- Utiliser une alimentation de 12V/11A,
- Mettre à sa sortie plusieurs condensateurs (8x4700µF en //) pour avoir une meilleure réponse aux courants pulsés,
- Mettre du fils de câblage courts (2x25cm) et de section > à 2mm².
Malgré tout le rendement est de 80% (entre +12VT et 200V) pour une charge de 41W. Ce qui peut paraitre correct mais indique une perte de 10W. En descendant la valeur de R5 à 3mOhms et en changeant Q1 BUK9217 par un IPD040N08NF2S le rendement s’est nettement amélioré à 88% (entre +12VT et 200V) sur une charge de 45W et le global à 86% entre le +12V de l’alimentation et le 200V :

Avec 45W de charge, il a ~1W de perdu dans les fils, pistes du PCB et les filtres entre +12V et +12VT. Les 6W de pertes entre +12VT et 200V sont dus à la résistance de mesure (0.6W), le mosfet (0.9W), le driver (<1W) et surtout le transformateur ~4W.
Quelle est la puissance nécessaire ? Si on considère qu’il faut un pulse pilote puis deux autres pour fractionner l’injection principale jusqu’à 2700 tr/mn puis un pilote et un principal au-delà, connaissant la durée du pulse, la tension et le courant on obtient le tableau suivant :
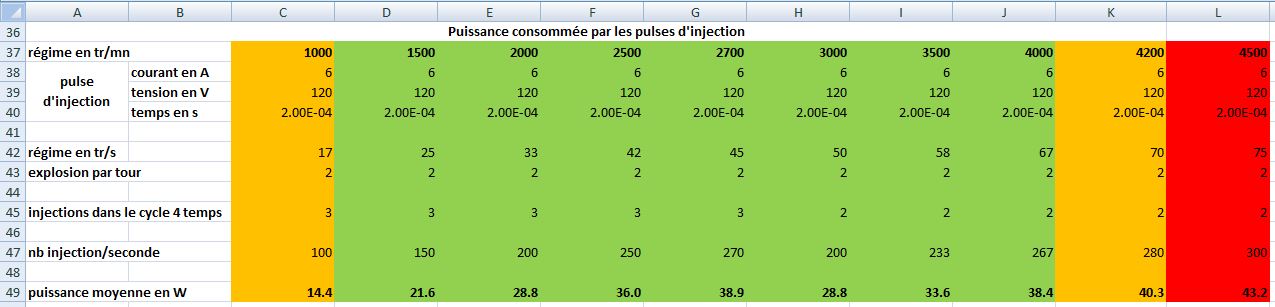
Notez qu’aux environs du régime de croisière à 75% la consommation sera minimum entre 2700tr/mn et 3000tr/mn du fait du passage de 3 à 2 pulses d’injection dans le cycle 4 temps.